期刊: The International Journal of Mechanical Sciences (IF:7.3)
引言
轴承是列车运行系统中的关键部件,其状况对列车安全有着重要影响。对于实时故障检测和建立智能列车运行维护系统,研究轴承故障识别和提高识别效率至关重要。
振动信号通常被用作列车轴承故障诊断的媒介。振动传感器采集的列车轴承振动信号往往是各种信号的调制和叠加,而现场采集的轴承信号大多是不平衡数据集,这给轴承故障特征提取和故障识别带来了很大困难。
介绍了信号分析方法,比如EMD,EEMD和CEEMD。
介绍了深度学习故障诊断方法。
介绍了一维信号转换为二维图像的一些研究。
由于从振动传感器获得的轴承振动信号经常与环境噪声、机械振动和异常振动信号相耦合,因此直接从原始信号中提取故障特征一方面增加了特征提取的难度,另一方面也增加了分类器的学习难度。
基于上述分析,利用CEEMD对轴承的振动信号进行分解,从中可以提取出包含异常信息的振动频带,并可以分离出包含故障信息的特征频带。
考虑到具有高相关性的IMF分量是多变量时间序列信号,基于多通道和MLP网络相结合的思想,提出了一种混合轴承故障识别方法。
算法
下图是本文提出算法的结构图:
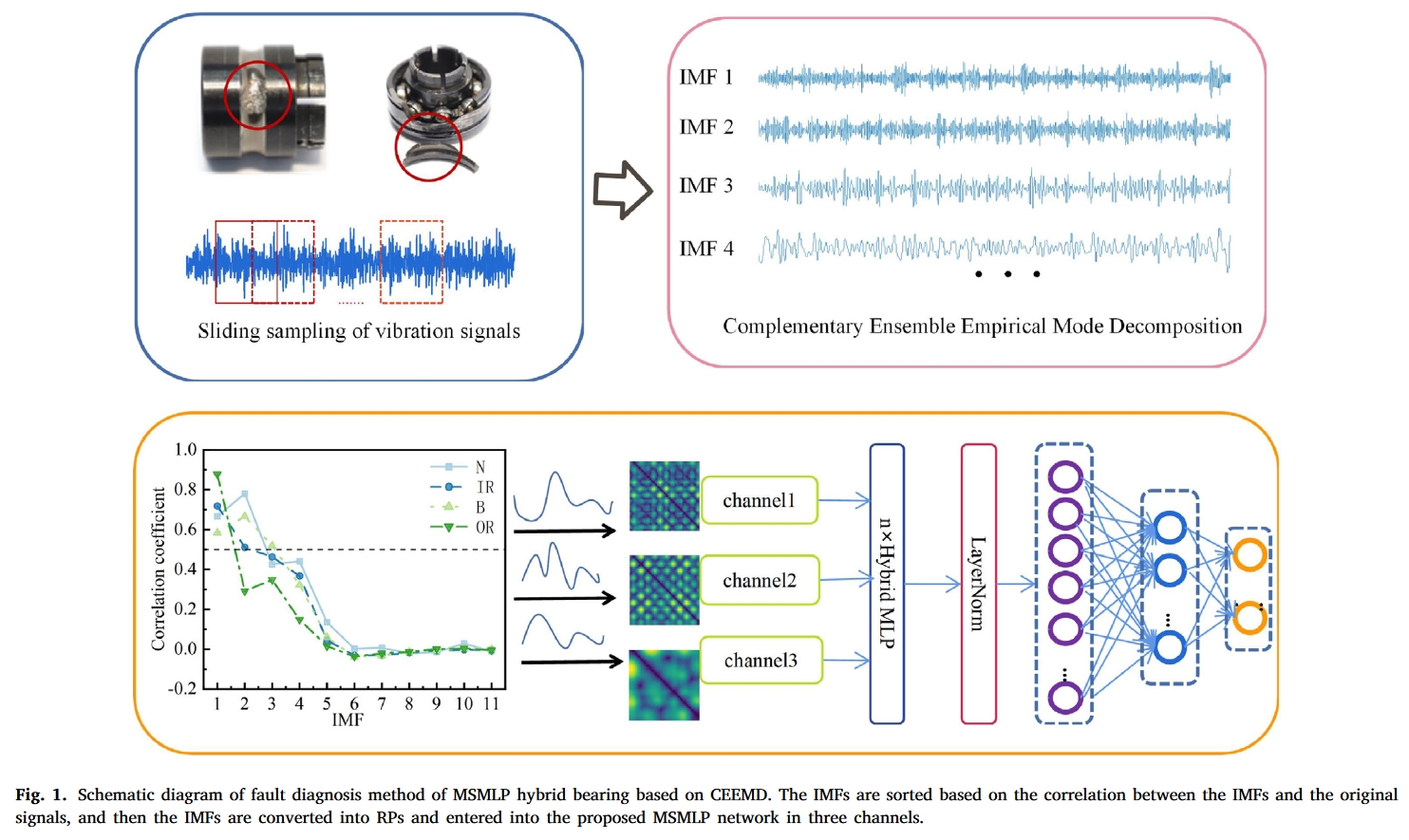
首先,利用滑动窗口对轴承振动信号进行分割。然后,使用递归绘图方法将样本转换为二维数据。
最后,处理后的样本被送往MSMLP进行测试和培训。下面将解释该方法的细节。
基于CEEMD的数据预处理
轴承振动信号主要包含结构噪声和环境噪声。为了减少噪声的影响,使用CEEMD对信号进行了预处理,本节将解释降噪预处理过程。
为了从轴承故障信号中提取出包含异常信息的振动频带,对原始信号进行预处理,筛选出包含故障信息的特征频带。已知样本的原始信号为$x(t)$,将互补高斯白噪声$n(t)$加到原始信号上,得到2n组新信号:
$x^+_i(t)=x(t)+n^+_i(t)$
$x^-_i(t)=x(t)+n^-_i(t)$
EMD用于分解并获得2n组IMF分量,这些分量被平均:
$imf_i=\frac{1}{2}(imf^+_i+imf^-_i)$
由此得到的$ imf_j $ 表示𝑥(𝑡) 被 CEEMD 分解后的各阶 IMF,其中 j 阶信号分解为特征模函数,j=1, 2, . , m.
从m阶IMF分量中提取高频分量和表示原始信号趋势的分量,即滤除轴承部件的固有振动和环境噪声信号等影响识别精度的分量。CEEMD对采集到的轴承振动信号进行预处理,将相关性较大的分量划分为多个通道进行输入网络。
递归图-一维转二维
递归图主要可以将非线性动力系统的行为可视化:它可以解释时间序列的内部结构:给出有关相似性、信息量和预测性的先验知识,是分析时间序列周期性、混沌性以及非平稳性的一种重要方法。
递归图是非平稳信号研究领域常用的处理与分析方法,其在机械探伤领域给予医学领域已有了成熟的应用。
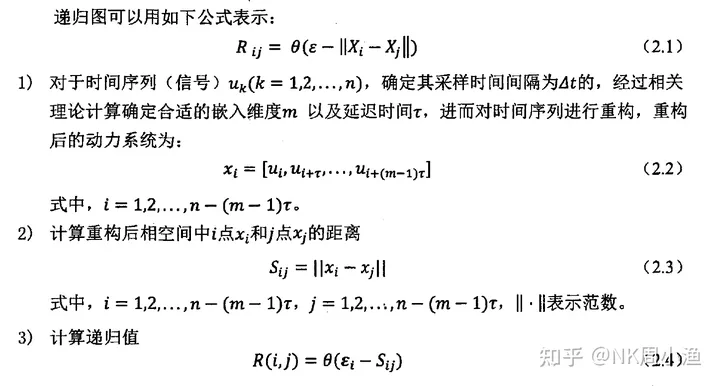
构造递归图的关键是进行相空间重构。所谓相,是指某个系统在某一时刻的状态,系统所有可能出现的相组合统称为相空间。相空间重构则是通过应用相关方法和更改相关参数,对原相空间内的时域信息进行重新构造,通过一系列变换将信号提升至更高维度,使信号产生某种系统特性。
相空间重构需要选择合适的延迟系数τ、嵌入维度m和阈值ε。比较常用的嵌入维度选取方法有伪邻域法,延迟系数选取有平均互信息法,最佳递归阈值目前没有较好的方法,一般选择峰值的10%。
起算法步骤如下:
还有一些一维信号转二维图片:
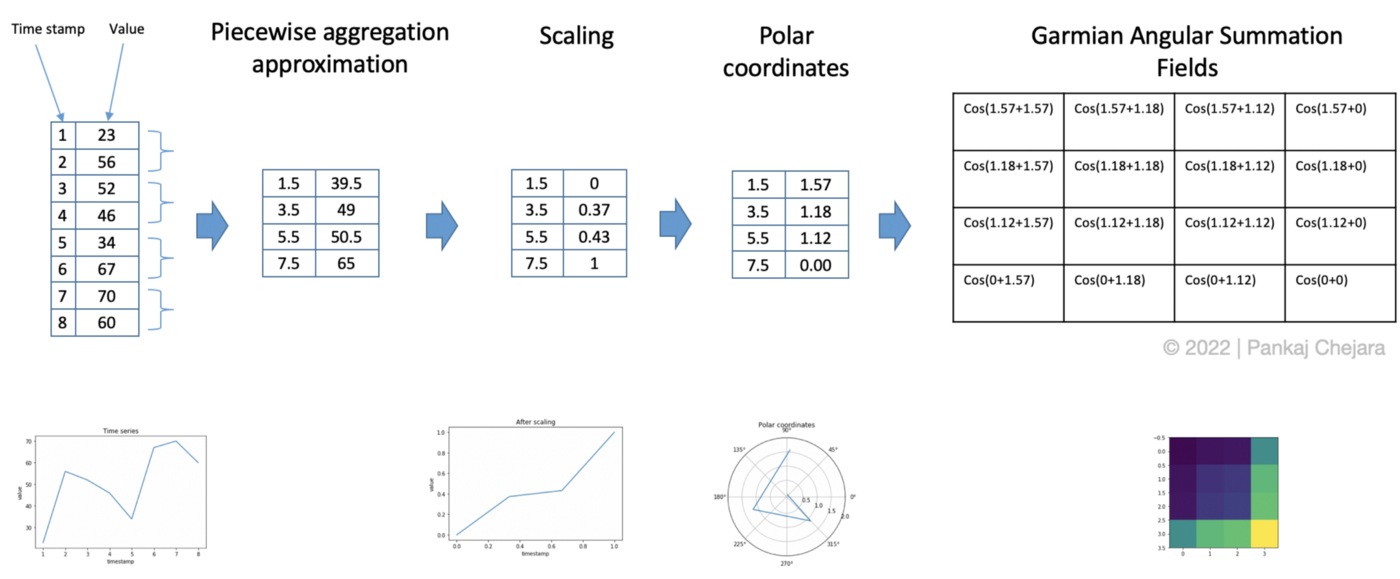
Gramian Angular Field, GAF(格拉姆角场):利用极坐标和格拉斯坐标转变。
- 通过取每个 M 点的平均值来聚合时间序列以减小大小。 此步骤使用分段聚合近似 ( Piecewise Aggregation Approximation / PAA)。
- 区间[0,1]中的缩放值。
- 通过将时间戳作为半径和缩放值的反余弦(arccosine)来生成极坐标。 这杨可以提供角度的值。
- 生成GASF / GADF。 在这一步中,将每对值相加(相减),然后取余弦值后进行求和汇总。
Markov Transition Field (马尔可夫变迁场):马尔可夫转变场是从时间序列获得的图像,表示离散时间序列的转变概率场。可以使用不同的策略对时间序列进行分类。
Architecture of MSMLP
NeurIPS2021年上的文章《MLP-Mixer: An all-MLP Architecture for Vision》提出了一个通过简单的mlp层堆叠而成的模型:MLP-Mixer。该模型在精度与卷积神经网络、视觉Transformer相似的情况下更高效。本文也算是follow这个工作,所以仅仅用了多层MLP。
MLP-Mixer中的网络如下:
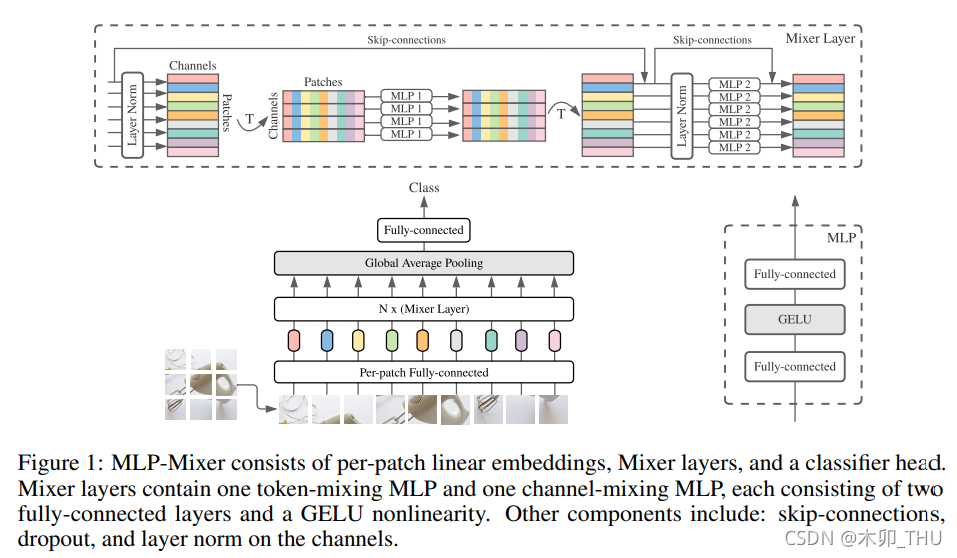
该文中不是简单的使用MLP,而是设计了一种新的操作,成为Mixer Layer,
具体操作为:
- 假设我们有输入图像 224 × 224 × 3 ,首先我们切 patch,例如长宽都取 32,则我们可以切成 7 × 7 = 49个 patch,每个 patch 是 32 × 32 × 3。我们将每个 patch 展平就能成为 49 个 3072 维的向量。通过一个全连接层(Per-patch Fully-connected)进行降维,例如 512 维,就得到了 49 个 token,每个 token 的维度为 512。然后将他们馈入 Mixer Layer。
- 细看 Mixer Layer,Mixer 架构采用两种不同类型的 MLP 层:token-mixing MLP 和 channel-mixing MLP。
- token-mixing MLP 指的是 cross-location operation,即对于 49 个 512维的 token,将每一个 token 内部进行自融合,将 49 维映射到 49 维,即“混合”空间信息;
- channel-mixing MLP 指的是 pre-location operation,即对于 49 个 512 512512 维的 token,将每一维进行融合,将 512 维映射到 512 维,即“混合”每个位置特征。为了简单实现,其实将矩阵转置一下就可以了。这两种类型的层交替执行以促进两个维度间的信息交互。单个 MLP 是由两个全连接层和一个 GELU 激活函数组成的。
- 此外,Mixer 还是用了跳跃连接(Skip-connection)和层归一化(Layer Norm),这里的跳跃连接其实不是 UNet 中的通道拼接,而是 ResNet 中的残差结构,将输入输出相加;而这里的层归一化与 DenseNet 等网络一致,作用于全连接层前面,进行前归一化(DenseNet 的 BN 层在卷积层前面,也有工作证明 LN 在 Multi-head Self-Attention 前会更好)。
具体见这里,感觉可以follow。
输入部分,每个信号片段经过CEEMD分解后有n个IMF,这些IMF经过PR预处理后得到n张图片,则将这些图片作为该信号片段的多个通道输入神经网络。
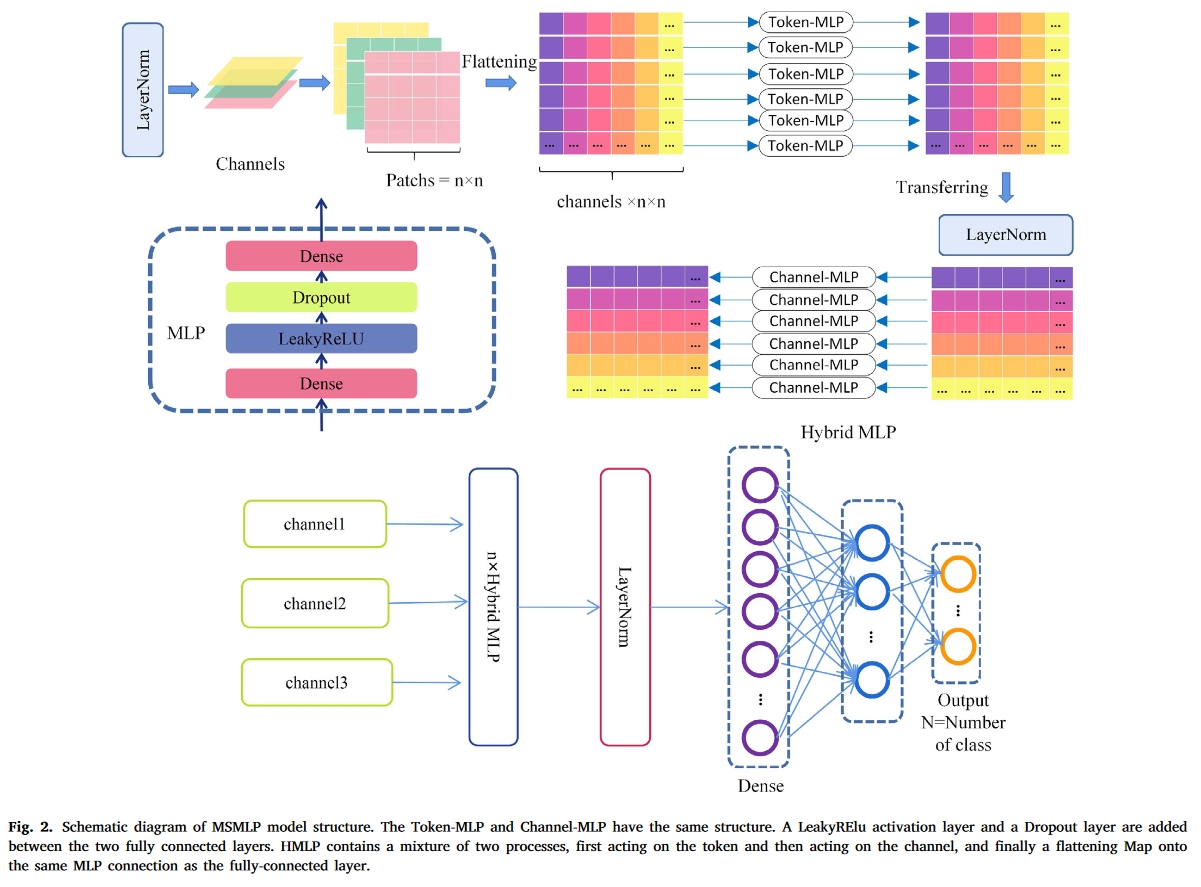
网络结构如下:
- n个混合MLP:即上面的Mix Layer
- 一个LayerNorm层
- 一个LeakyRelu层
- 和一个Droupout层
结构图(其实就是Mix MLP的结构):
实验
数据集
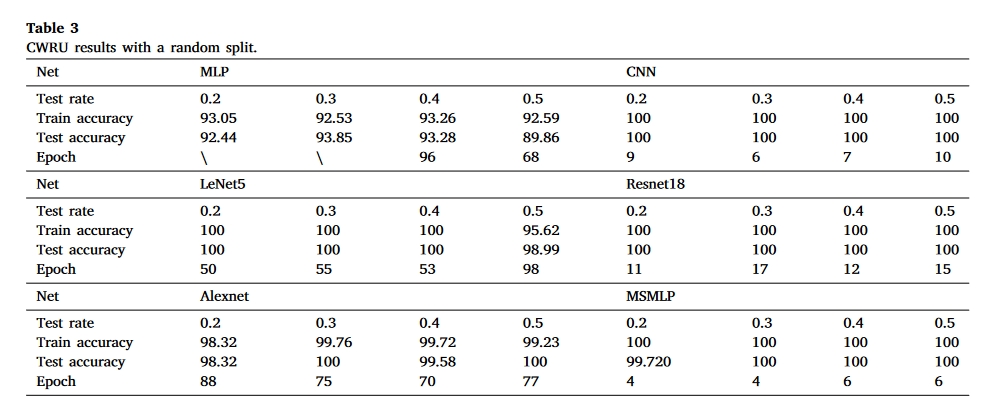
- CWRU
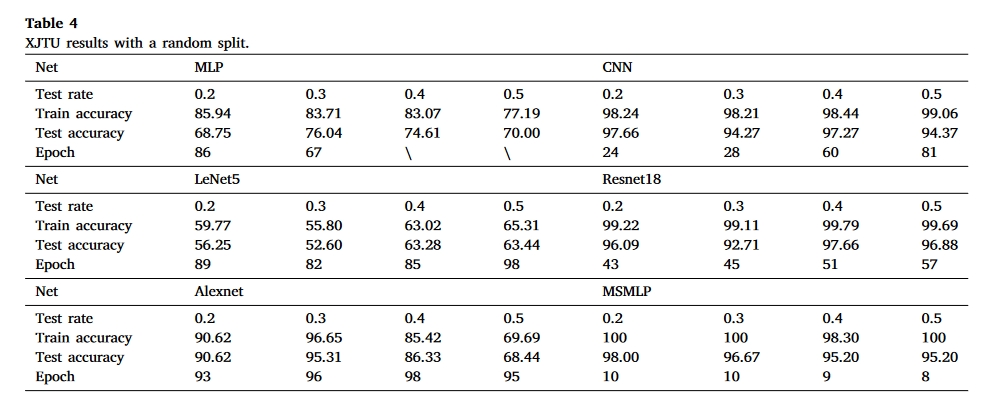
- XJTU
- CSU
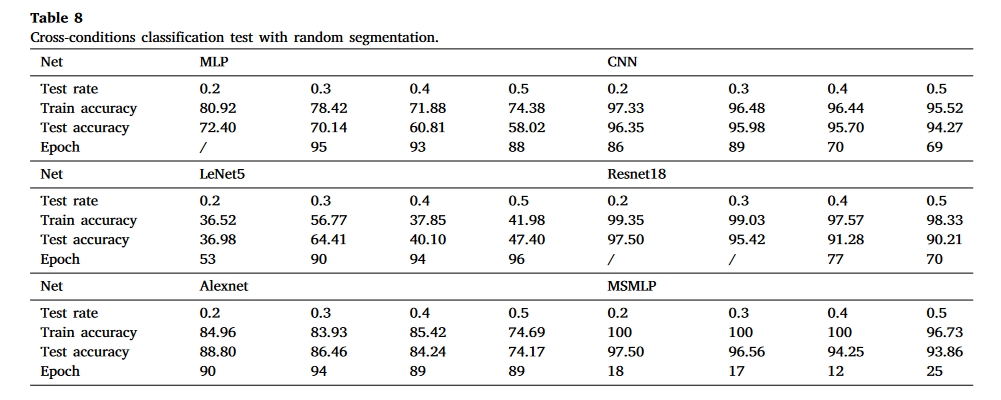
实验结果
总结
本文也算是追热点的一篇文章,Transformer团队在NeurIPS2021上提出了Mix-MLP。而本文所谓的multi-scale,也只是用了CEEMD(CEEMD)使用了多尺度交叉熵。本质上提出了一个pre-processing+feature extractor的framework,没有对网络本身提出改进。